Вступ
Остеоартроз кульшового суглоба (ОА) є одним із найбільш поширених і інвалідизуючих станів, що вражають людей похилого віку. За оцінками, довічний ризик симптоматичного ОА тазостегнового суглоба становить 25 % у людей, які доживають до 85 років [13], але останніми роками вік остеоартрозу значно зменшився, і все більше випадків спостерігають у людей до 40 років [7, 16]. Тому збереження фізичної активності пацієнтів після артропластики сьогодні стає все більш актуальним.
Коксартроз супроводжується порушенням амортизаційних властивостей хряща, його потоншенням і руйнацією, появою больового синдрому, порушенням рухових функцій внаслідок зменшення сили м’язів і розвитку стійких згинально-привідних контрактур, які змінюють вроджені рухові програми, а при тривалому перебігу дегенеративного захворювання призводять до формування патологічних звичок. Ендопротезування кульшового суглоба усуває больовий синдром, відновлює обсяг рухів, але часто відновлення сили м’язів відбувається повільно і не в повному обсязі. Часто відновленню функціональності заважають збережені остаточні прояви хибних рухових звичок.
Дослідження механізмів регуляції пози людини (стояння та ходьба як варіанти позної регуляції) залишається актуальним завданням фізіології рухів упродовж десятиріч. Причина полягає у високій значущості результатів досліджень для розробки методів діагностики й лікування різних порушень функцій опорно-рухової та центральної нервової систем людини, а також для теоретичних засновок для розробки систем керування рухами людини [3]. На сучасному рівні розвитку проблеми аналіз тільки інструментальних методів дослідження вже недостатній, тож час потребує створення математичних моделей, які реалізують різні ортопедичні чи неврологічні вади в регуляції рухів людини [1, 2, 4].
Мета роботи: визначити необхідну силу м’язів нижньої кінцівки в умовах обмеження рухів у кульшовому суглобі для підтримки вертикальної пози при двохопорному стоянні.
Матеріали та методи
Моделювання роботи м’язів нижніх кінцівок в умовах обмеження рухів у кульшовому суглобі проводили в програмі OpenSim 4.0 — системі з відкритим кодом для біомеханічного моделювання й аналізу. Програмний комплекс надає інструменти для проведення досліджень біомеханіки руху. OpenSim створено Центром біомедичних обчислень NIH в Стенфордському університеті, який надає провідні програмні та обчислювальні інструменти для фізико-орієнтованого моделювання та моделювання біологічних структур [6]. В основу динамічного моделювання стояння покладена модель ToyLandingModel [15], яка має об’єкти контактної геометрії для фіксування моделі на площі опори (рис. 1).
Для стабілізації моделі рухомість у хребті та суглобах нижніх кінцівок обмежувалися у межах ±5°. Для створення моделей для аналізу стояння були проведені такі зміни.
Модель 1 (здоровий кульшовий суглоб). Рухи у кульшовому суглобі в діапазоні: розгинання/згинання — 2,5°/0°/2,5°; відведення/приведення та ротація — заблоковані, рухи у колінному суглобі — розгинання/згинання — 0°/0°/4°, розворот стопи — 5°.
Модель 2. Розгинання/згинання — 2,5°/0°/2,5°, привідна установка — 5°; ротація — заблокована; рухи у колінному суглобі — розгинання/згинання — 0°/0°/4°, розворот стопи — 5°.
Модель 3. Згинальна установка — 10°; привідна установка — 7°, ротація — заблокована; рухи у колінному суглобі — розгинання/згинання — 0/5/5°, розворот стопи — 7°.
Модель 4. Згинальна установка — 20°; привідна установка — 10°; рухи у колінному суглобі — розгинання/згинання — 0°/10°/10°, розворот стопи — 10°. Вкорочення стегнової кістки 2 см.
Для забезпечення рівноважного положення моделі були виконані зміни в анатомічних співвідношеннях згідно з [8].
Аналізували зміни у м’язах правої кінцівки, а саме проводили оцінку щодо сили, яку повинні розвити м’язи для виконання нормального руху. Оцінку зміни сили м’язів проводили у відсотках до норми (модель 1).
Анатомія м’язів надана за [11].
Результати
Функція підтримки рівноваги при двохопорному стоянні є доволі складним руховим актом. У нормі коливання тіла при стоянні становить у межах ±4°, але при ортопедичних захворюваннях, які супроводжуються больовим синдромом та обмеженням рухів у суглобах, постуральна картина змінюється. Обмеження рухів в одних суглобах компенсується збільшенням рухливості в інших, зменшення одних груп м’язів компенсується збільшенням скорочення інших м’язових груп.
Першою ознакою остеоартрозу кульшових суглобів є обмеження привідно-відвідних рухів, при таких контрактурах зміни виникають у привідних м’язах (аддуктора) стегна. У моделі, яку розглядаємо з аддукторів, наведений м’яз m.adductor magnus. Це найбільший м’яз медіальної групи, при стоянні його функція полягає в контролі положення стегна (аддукція та розгинання).
За даними моделювання (рис. 2) ми визначили, що в нормі стабілізація m.adductor magnus настає у перші 0,07 с із максимальною силою скорочення 200 Н, привідна контрактура (модель 2) зменшує силу скорочення m.adductor magnus до 170 Н, стабілізація моделі настає у той же час — на 0,07 с. Згинально-привідна контрактура вимагає m.adductor magnus у початковий період збільшити необхідну силу стабілізації до 600 Н, цей викид сили скорочення м’яза триває 0,03 с, але потім сила скорочення зменшується до рівня 170 Н, але тривалість стабілізації збільшується до 0,2 с.
Цікаво поводить себе модель при згинально-привідній контрактурі з вкороченням кінцівки, тобто m.adductor magnus практично виключається з процесу стабілізації моделі на 0,025 с і максимальна сила його скорочення не перевищує 100 Н. Така робота м’яза, на наш погляд, пов’язана з його контрактильним станом, тобто стан постійного скорочення, в якому м’яз не може повноцінно виконувати свою функцію.
Розглянемо функцію m.gracilis (рис. 3А) та m.pectineus (рис. 3Б) у підтримці стабільності при двохопорному стоянні. Функція цих м’язів аналогічна попередньому. Функція m.gracilis і m.pectineus при стоянні незначна, тобто в нормі (модель N) рівень скорочення цих м’язів не перевищує 15 Н, наявність привідної контрактури (модель 2) зменшує силу скорочення цих м’язів до 7 Н, але згинально-привідна контрактура (модель 3) вимагає збільшення рівня сили скорочення m.gracilis до 26 Н, а m.pectineus — майже до 70 Н. Згинально-привідна конт-рактура із вкороченням кінцівки (модель 4) більше впливає на роботу m.pectineus, як більш довгого м’яза. Треба відмітити, що при всіх обмеженнях рухів у кульшовому суглобі впродовж усього терміну розрахунку спостерігаються викиди скорочень незначної сили (до 3 Н), які показують моменти підлаштування стабільності моделі.
M.quadratus femoris при стоянні утримує стегно в анатомічному положенні, утримує головку стегна в вертлюжній западині [12].
Як показало моделювання, в m.quadratus femoris (рис. 4) відбуваються помітні зміни за наявності конт-рактур. У нормі (модель N) м’яз практично не працює в режимі початкової стабілізації, а виконує більш коригуючу функцію, коли модель виходить з рівноваги для її повернення в зону стабільності. За наявності привідної контрактури (модель 2) таких плавних коригувань рівноваги вже не видно, але спостерігаються високоенергетичні викиди до 30 Н. Згинально-привідна контрактура (модель 3) показує, що для стабілізації моделі необхідна значна сила скорочення m.quadratus femoris, і сам процес стабілізації збільшується до 0,2 с. Модель згинально-привідної контрактури із скороченням (модель 4) має ознаки і моделі 3 — значний викид до 30 Н скорочення в початковий період стабілізації, і моделі 2 — наявність піків підлаштування на всьому терміні розрахунку.
Розглянемо м’язи сідничної ділянки — м’язи m.gluteus maximus, m.gluteus medius і m.gluteus minimus. На нашій моделі розглянемо роботу перших двох м’язів.
M.gluteus maximus є найбільшим і тяжким м’язом тіла людини. Він здатен розвивати значні зусилля для виконання тяжкої роботи, таких як стрибок, підйом сходами, але при звичайній ходьбі практично не використовується. Але m.gluteus maximus виконує декілька функцій стабілізації — балансування таза на головках стегнової кістки, таким чином підтримуючи вертикальне положення, прикріплення через клубово-великогомілковий тракт підтримує латеральне коліно, а також коригує підйом медіального поздовжнього склепіння стопи [17].
За результатами нашої моделі (рис. 5А) в нормі (модель N) стабілізація, тобто прийняття стійкого вертикального положення, настає на 0,05 с значним скороченням у 275 Н, з наступним регулюванням до 0,2 с. За наявності згинальної контрактури (модель 2) коригування настає раніше, але зі зменшенням сили скорочення до 175 Н, але триває теж до 0,2 с. Для моделі 3 спостерігається збільшення піка скорочення до 200 Н, але стабілізація моделі супроводжується більшим часом — до 0,25 с. Цікавим виявилася поведінка m.gluteus maximus при згинально-привідній контрактурі із вкороченням кінцівки — практично повна відсутність її роботи. На нашу думку, це можна пояснити тим, що відсутність повноцінної опори на стопу та вимушене згинання тіла вимикають м’яз з роботи і функцію стабілізації беруть на себе інші м’язи.
Роль m.gluteus medius (рис. 5Б) у підтримці вертикальної пози полягає у стабілізації таза у фронтальній площині [10]. Виходячи з її функції, можна пояснити роботу m.gluteus medius в умовах обмеження рухів. Тобто в нормі при симетричному навантаженні на кінцівки стабілізація настає спочатку сильним скороченням до 600 Н, але при збільшенні обмеження рухів і порушенні повноцінної опори на кінцівку м’яз поступово втрачає здатність функціювання і для моделі 4 практично виходить з роботи.
M.tensor fasciae latae (TFL) при стоянні (рис. 6) виконує допоміжну роль стабілізації таза на головках стегнової кістки, тобто працює синхронно з m.gluteus maximus. TFL не розвиває надмірних зусиль, як видно з результатів моделювання, стабілізація моделей (модель N, 2 та 3) настає до 0,05 с, і далі спостерігається тільки підлаштування стійкості. Але в моделі 4 можна спостерігали зростання рівня скорочення TFL, що обумовлено значним порушенням навантаження кінцівки.
Отже, в моделі 4 ми спостерігали зниження активності m.gluteus maximus, а саме TFL бере на себе функцію стабілізації, що проявляється зростанням її активності.
M.sartorius переважно виконує функцію згинання стегна та колінного суглоба, при стоянні м’яз практично не задіяний. Але в умовах контрактур через те, що м’яз виконує і згинання, і ротацію стегна, функція його може бути значно порушена.
Отже, як показано на рис. 7, функціонування м’яза в нормі, у згинально-привідних контрактурах спостерігаються тільки імпульси підлаштування стійкості моделі. А от за наявності вкорочення довгий за своєю протяжністю м’яз переходить в контрактильний стан і для підтримки стійкості потребує збільшення сили скорочення.
M.iliоpsoas — подвійний попереково-клубовий м’яз, головна функція при стоянні — підтримка вертикальної пози [5].
За результатами моделювання було показано (рис. 8), що привідна контрактура (модель 2) практично не впливає на функцію m.iliоpsoas. Згинальна контрактура (модель 3) показує збільшення його скорочення й в моделі 4, коли додається вкорочення кінцівки для стабілізації вертикального положення м’яза, необхідно значне збільшення сили — у нашій моделі втричі. У моделях 3 та 4 згинальна контрактура вимушує до згинання тіла і, відповідно, напруження краніальної частини м’яза, який безпосередньо відповідальний за вертикальну поставу. І чим більше згинання тіла, тим більше зусиль потребує м’яз для відновлення нормальної постави.
M.rectus femoris — м’яз центральної ділянки стегна, який проходить через його середину. Саме це обумовлює його роль спільно з m.iliоpsoas підтримувати вертикальну поставу.
Результати нашого моделювання (рис. 9) показали, що m.rectus femoris при збільшенні згинальних конт-рактур зменшує свою роботу, тобто в нормі і при привідній контрактурі (модель 2) m.rectus femoris працює синхронно з m.iliоpsoas, а при згинальній вся функція за вертикальну поставу лягає на m.iliоpsoas.
M.biceps femoris надає задню стійкість таза при стоянні [14].
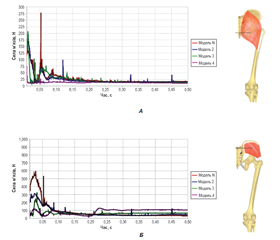
Стабілізація рівноваги (рис. 10) в нормі (модель N) вимагає від m.biceps femoris роботи для приведення стегна від 1500 Н до 730 Н, в моделі 2 сила скорочення м’яза зменшується до 1250 Н і 500 Н відповідно, через привідну установку стегна. У моделі 3 ця ситуація ще більше зменшує силу м’яза до 750 Н без імпульсу підлаштовування, і в моделі 4 можна бачити практично відсутність роботи m.biceps femoris.
M.medial gastrocnemius — м’яз задньомедіальної частини гомілки. Як було описано вище, для підтримки рівноваги головну роль відіграє гомілковий суглоб. M.medial gastrocnemius відповідає саме за функціональність надп’ятково-гомілкового суглоба.
Вже відмічали, що згинально-привідні контрактури призводять до функціонального вкорочення кінцівки, тобто для вирівнювання її довжини основна опора здійснюється на передню частину стопи. Це пояснює поведінку м’яза в моделі 4 (рис. 11), коли необхідна сила скорочення для стабілізації збільшується в 10 разів (до 300 Н) порівняно з іншими моделями (в середньому 30 Н) і залишається високою впродовж усього етапу розрахунку моделі. Звичайно, у реальному стані така сила скорочення не можлива.
M.tibialis posterior — ключовий стабілізуючий м’яз, який підтримує медіальне склепіння стопи. Отже, будь-які зміни в опорі на стопу призведуть до порушення роботи м’яза.
Такі зміни показані на рис. 12 результатів моделювання. По-перше, упродовж усього періоду розрахунку стабілізації моделей видна робота m.tibialis posterior. Причому вже в моделі 2 видно, що періоди активації м’яза зміщені відносно норми. Поява згинальної контрактури (модель 3) призводить до збільшення сили скорочення м’яза з 280 Н в нормі до 500 Н в моделі 3, а при додаванні вкорочення кінцівки сила скорочення м’яза збільшується ще більше — до 680 Н. Це можна пояснити тільки тим, що при згинальних контрактурах основна опора здійснюється на носок стопи, п’ятка не задіяна в опорі, тому стабілізація потребує більшої сили скорочення.
Дія m.tibialis anterior — м’яза передньої групи гомілки прямо протилежна m.tibialis posterior. При згинальних контрактурах стопа знаходиться в розігнутому стані з перевантаженням латерального відділу стопи з метою підтримки рівноваги, а m.tibialis anterior відповідає за медіальну групу стопи. Отже, при привідній контрактурі стопа навантажена повністю і робота м’яза практично не відрізняється від норми (рис. 13) (незначне зміщення періодів підлаштування стабілізації), а при згинальній контрактурі м’яз практично не напружується і вмикається тільки в окремі періоди за необхідності стабілізації фронтального коливання тіла.
Обговорення
За даними моделювання було визначено, що при незначних привідних контрактурах кульшового суглоба робота м’язів нижньої кінцівки при двохопорному стоянні змінюється мало. При згинально-привідних контрактурах спостерігаються зміни практично в усіх м’язах нижньої кінцівки. Є деякі особливості в роботі м’язів в умовах контрактур. Усі м’язи навколо стегна зменшують необхідну силу для підтримки рівноваги, а м’язи гомілки, навпаки, збільшують необхідну силу в декілька разів. Наприклад, m.medial gastrocnemius при згинально-привідній контрактурі з вкороченням кінцівки розвиває компенсаторну силу в 10 раз більше (200 Н), ніж в нормі (20 Н), і хоча ресурси м’яза становлять 1500 Н, для підтримки вертикальної пози це дуже затратно. Аналогічно потребують збільшення сили m.tibialis posterior (збільшення втричі), але м’яз-антагоніст m.tibialis anterior, навпаки, зменшує силу скорочення в середньому на 100 Н.
Моделювання роботи м’язів в умовах контрактур кульшового суглоба підтвердило дослідження деяких авторів [18], які на аналізі магнітно-резонансної томограми хворих на коксартроз показали зменшення сили та маси сідничних м’язів, причому втрата маси відповідала тяжкості дегенеративного захворювання. Зміни, які були визначені у m.illiopsoas, підтверджують дослідження [9], які визначили, що сила і маса скелетних м’язів обернено корелюють з тяжкістю остеоартрозу.
Висновки
За даними проведеного моделювання двохопорного стояння з обмеженням рухів у кульшовому суглобі було доведено, що збільшення обмеження рухів змінює характер скорочення м’язів усієї нижньої кінцівки та таза. Аналіз отриманих результатів показав, що обмеження рухів зменшує необхідну силу стабілізації м’язів навколо кульшового суглоба і збільшує необхідну силу скорочення м’язів гомілки. Тобто спостерігається порушення балансу м’язів.
Конфлікт інтересів. Автори заявляють про відсутність конфлікту інтересів та власної фінансової зацікавленості при підготовці даної статті.
Отримано/Received 08.09.2021
Рецензовано/Revised 21.09.2021
Прийнято до друку/Accepted 01.10.2021
Список литературы
1. Страфун С.С., Фіщенко О.В., Карпінська О.Д. Моделювання ходьби хворих на коксартроз зі зменшеною довжиною плеча дії абдукторів стегна. Травма. 2018. Т. 19. № 3. С. 39-48. DOI: 10.22141/1608-1706.3.19.2018.136405.
2. Тяжелов А.А., Карпинская Е.Д., Карпинский М.Ю., Браницкий А.Ю. Влияние контрактур тазобедренного сустава на силу мышц бедра. Georgian Medical News. 2020. № 9(306). С. 10-18. PMID: 33130638.
3. Тяжелов О.А. Карпінський М.Ю., Карпінська О.Д., Браніцький О.Ю., Обейдат Халед. Патологічні постураль-ні патерни за умов тривалого перебігу остеоартрозу суглобів нижніх кінцівок. Ортопедия, травматология и протезирование. 2020. № 1. С. 26-32. DOI: 10.15674/0030-59872020126-32.
4. Фіщенко В.О., Браніцький О.Ю., Гоцул О.В., Карпінська О.Д. Математичне моделювання ходьби людини при комбінованій контрактурі кульшового суглоба. Травма. 2019. Т. 20. № 4. С. 100-105. DOI: 10.22141/1608-1706.4.20.2019.178752.
5. Arbanas J., Starcevic Klasan G., Nikolic M., Jerkovic R., Miljanovic I., Malnar D. Fibre type composition of the human psoas major muscle with regard to the level of its origin. Journal of anatomy. 2009. Vol. 215(6). Р. 636-41.
6. Delp S.L., Anderson F.C., Arnold A.S., Loan P., Habib A., John C.T., Guendelman E., Thelen D.G. OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement. IEEE Transactions on Biomedical Engineering. 2007. Vol. 54(11).
7. Eskelinen A., Remes V., Helenius I., Pulkkinen P., Nevalainen J., Paavolainen P. Uncemented total hip arthroplasty for primary osteoarthritis in young patients: a mid-to long-term follow-up study from the Finnish Arthroplasty Register. Acta Orthop. 2006. Vol. 77(1). Р. 57-70. doi: 10.1080/17453670610045704.
8. Hasegawa K., Okamoto M., Hatsushikano S., Shimoda H., Ono M., Homma T., Watanabe K. Standing sagittal alignment of the whole axial skeleton with reference to the gra-vity line in humans. Journal of Anatomy. 2017. Vol. 230(5). Р. 619-630. doi: 10.1111/joa.12586.
9. Jeon H., Lee S.U., Lim J.Y., Chung S.G., Lee S.J., Lee S.Y. Low skeletal muscle mass and radiographic osteoarthritis in knee, hip, and lumbar spine: a cross-sectional study. Aging Clin. Exp. Res. 2019. Vol. 31(11). Р. 1557-1562. doi: 10.1007/s40520-018-1108-5.
10. Kendall F.B., McCreary E.K., Provance P.G. Muscles: Testing and Function, with Posture and Pain (Kendall, Muscles) 5-North American Edition. Philadelphia. Lippincott Williams & Wilkins, 2005.
11. Kenneth S.S. Anatomy & Physiology: The Unity of Form and Function. 6th ed. McGraw-Hill, 2010.
12. Moore K.L., Dalley A.F., Agur A.M.R. Clinial oriented anatomy. Philadelphia: Wolters Kluwer, 2010.
13. Murphy L.B., Helmick C.G., Schwartz T.A. et al. One in four people may develop symptomatic hip osteoarthritis in his or her lifetime. Osteoarthr. Cartil. 2010. Vol. 18(11). Р. 1372-9. doi: 10.1016/j.joca.2010.08.005.
14. Wheeless C.R., Nunley J.A., Urbaniak J.R. Orthopaedic References and Discussions for Physicians. https://www.wheelessonline.com/
15. Seth A., Hicks J.L., Uchida T.K., Habib A., Dembia C.L., Dunne J.J., Ong C.F., DeMers M.S., Rajagopal A., Millard M., Hamner S.R., Arnold E.M., Yong J.R., Lakshmikanth S.K., Shermann M.A., Delp S.L. OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. Plos Computational Biology. 2018. Vol. 14(7).
16. Sharkey P.F., Austin M.S., Hozack W. Total hip arthroplasty in the young patient. Instr. Course Lect. 2006. Vol. 55. Р. 173-6. PMID: 16958450.
17. Vleeming A., Mooney V. Movement, Stability & Lumbopelvic Pain. 2nd Edition. Philadelphia, Churchill Livingstone. 1st March 2007.
18. Zacharias A., Green R., Semciw A., English D.J., Kapakoulakis T., Pizzari T. Atrophy of hip abductor muscles is related to clinical severity in a hip osteoarthritis population. Clinical anatomy. 2018. Vol. 31(4). Р. 507-513. https://doi.org/10.1002/ca.23064
/23.jpg)
/24.jpg)
/25.jpg)
/26.jpg)
/27.jpg)